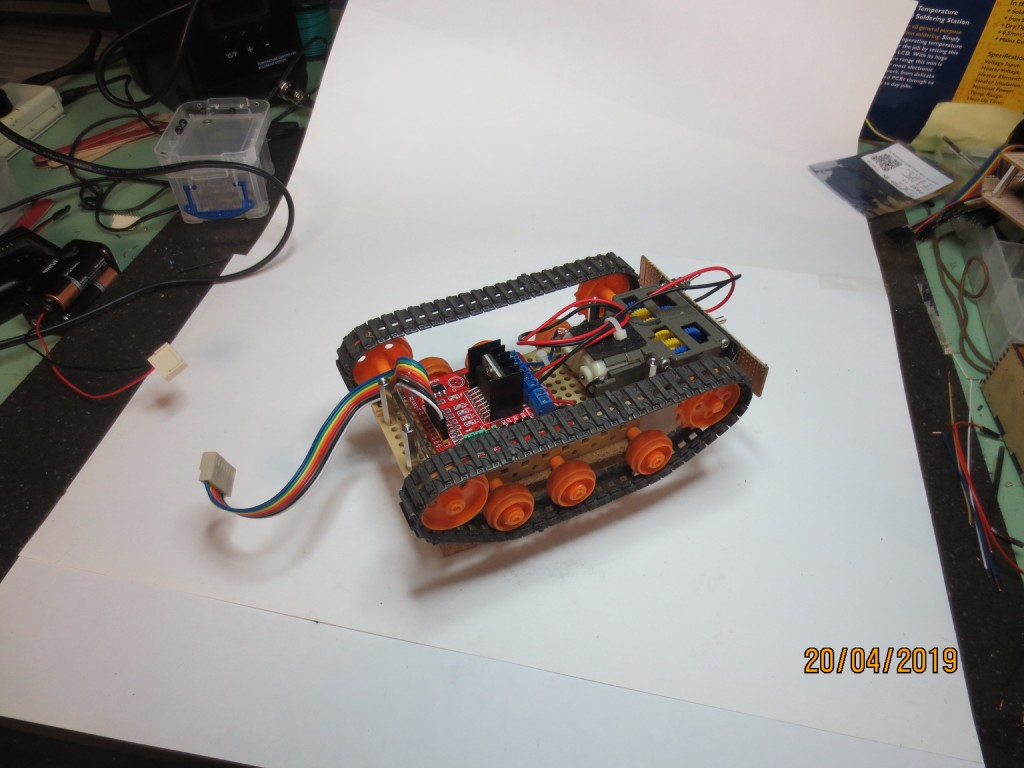
STEVE is brake steer rover.
It is based on the Tamiya tracked chassis.
The plan is to get the arduino to drive the H-bridges and then the main controler is going to be a TinyFPGA-BX. I have a number of sensors to attach, but first thing first.
The code for STEVE is a available in my tinybx_stuff repository under STEVE. This will be updated as the build continues.
Drive control
The drive system is a Dual H-Bridge that uses a L298N to provide control the direction and speed of a motor for each track of the rover.
This is connected in turn to a Arduino pro mini running at 5V. The current program just runs a preprogrammed sequence. This control will need to be exposed as some kind of serial interface (UART/SPI). I also have a compass that will be integrated to get a bearing for rotation control.
Navigaion
I have a Autopilot in my stuff box and it has all the sensors for a good IMU, it also has a GPS. The integration with this device is going to be complicated but will make for much more data.
Primary Control
The primary controller is going to be a TinyFPGA-BX where I can build some custom logic sytems running at hight speed. I am also considering adding in some machine learning for the overarching control.
Build
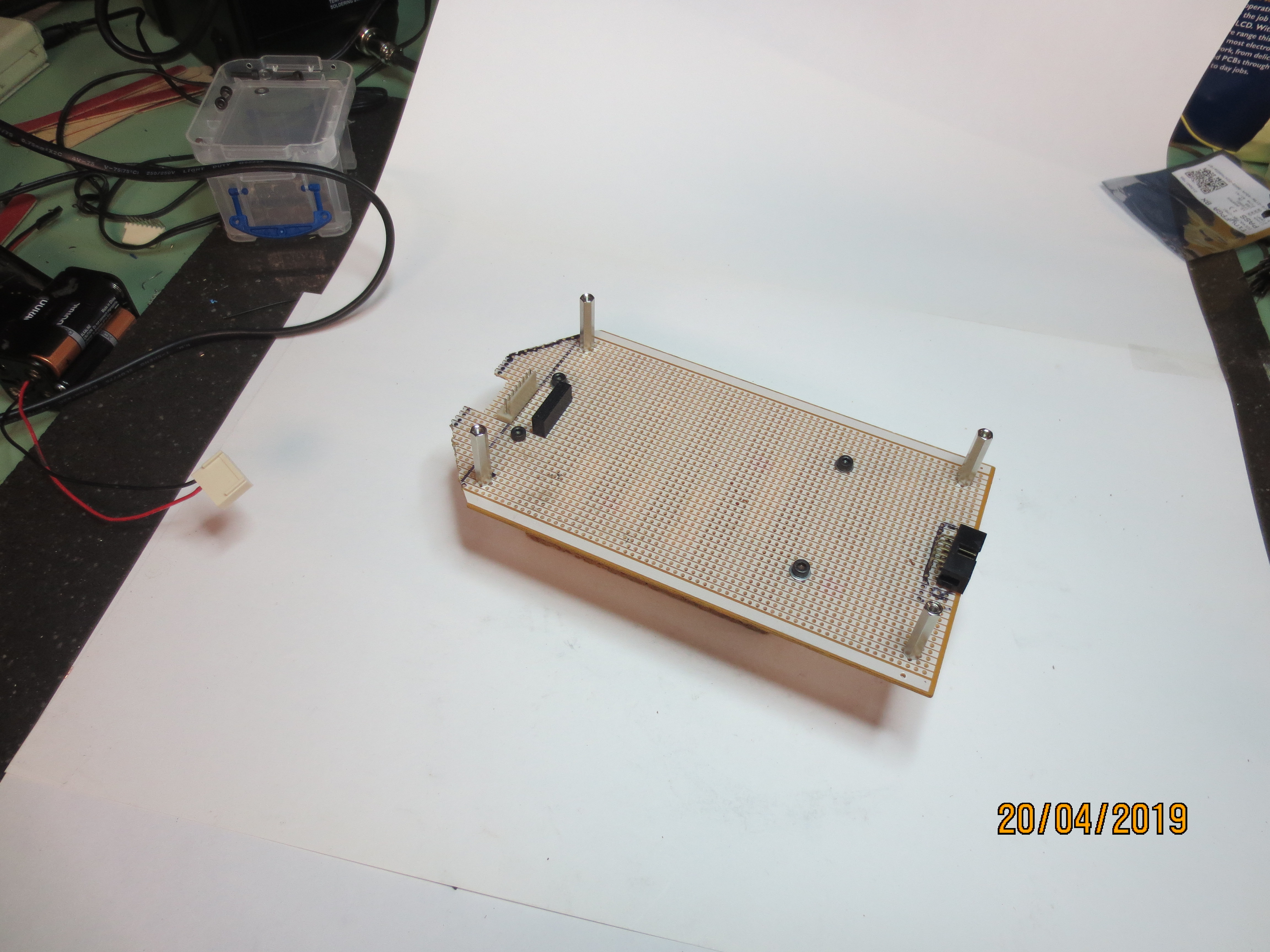
Perfboard is cool. With a drill bit, side cutters and a soldering iron it is possible to build very many things. Currently the design is three levels using 3mm spacers and cap head bolts.
Base
This is tamiya drive construction with two drive motors and the H-Bridge controller
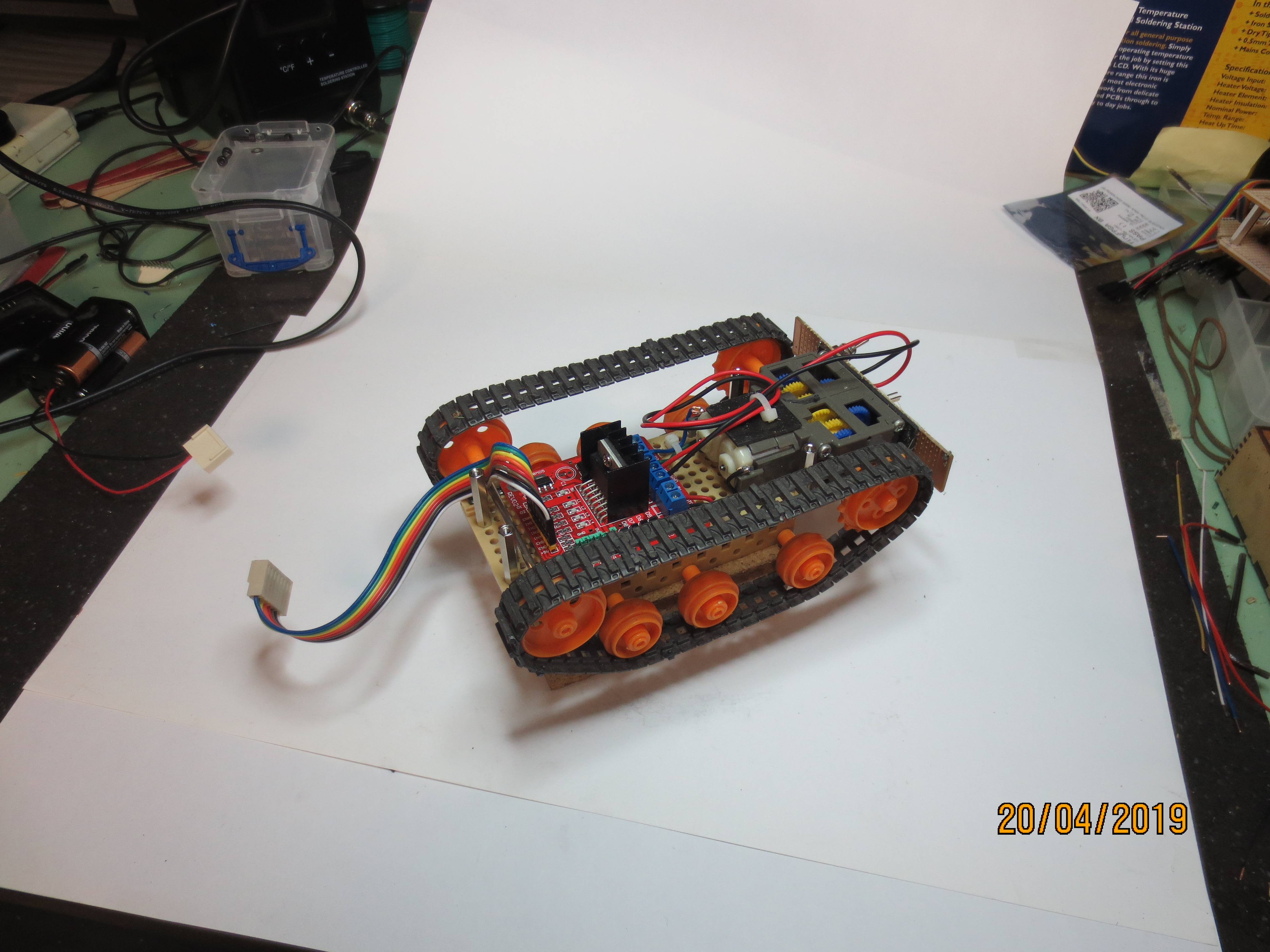
Level 1
Base plaform with all the primary control signals from the H-Bridge brought up with a rainbow cable.

The signals lines for the motor controller broken out into a 10 pin IDC connector and a dodgy remote control when debugging the intial control.
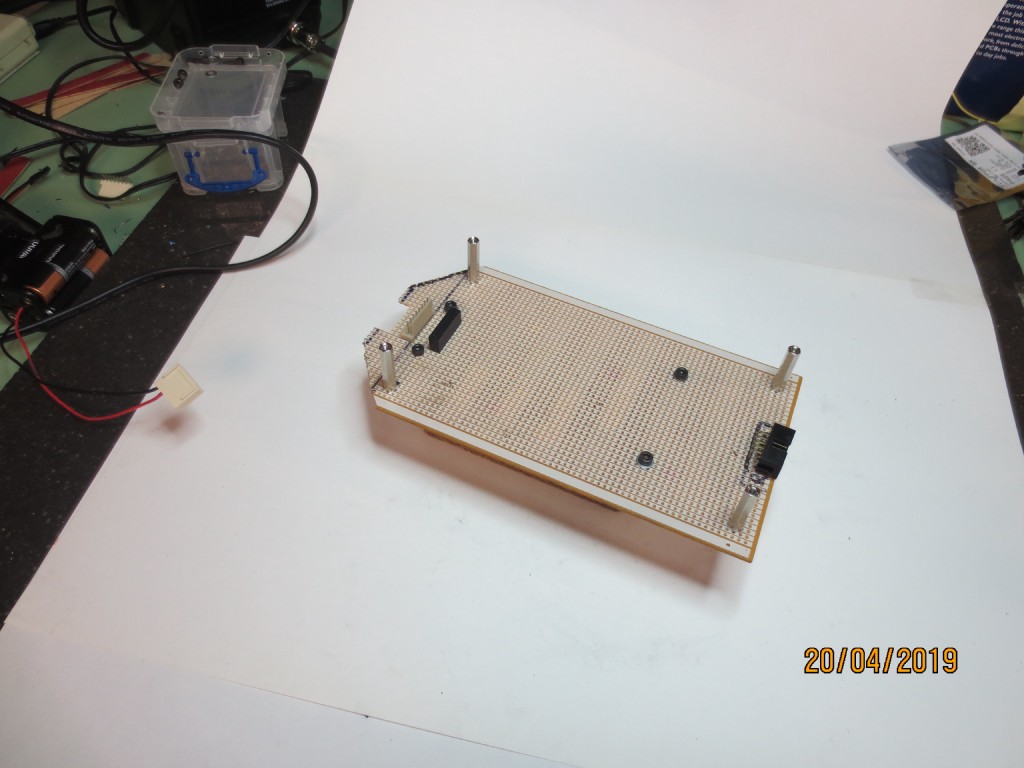
This is the top view of the same perfboard , it is going to have a battery holder and perhaps some more control electronics for the current sense on the motor controller.
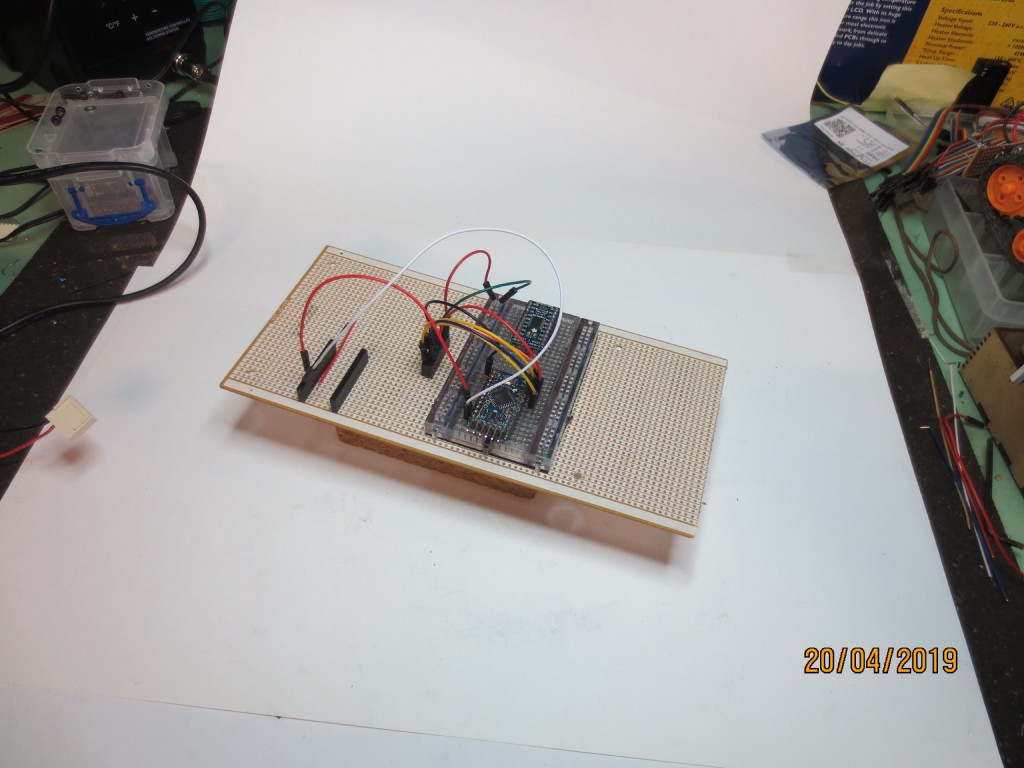
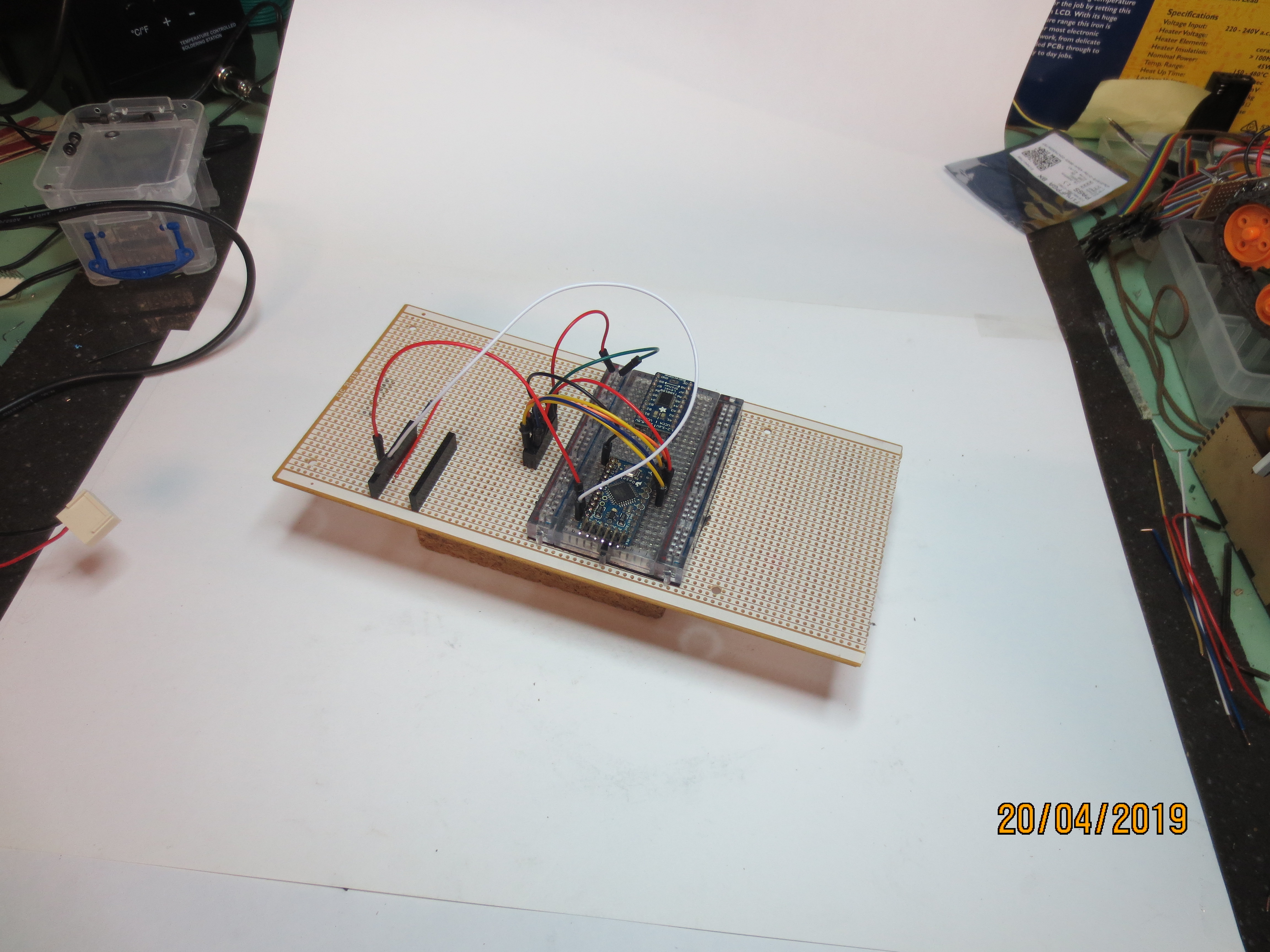
Level 2
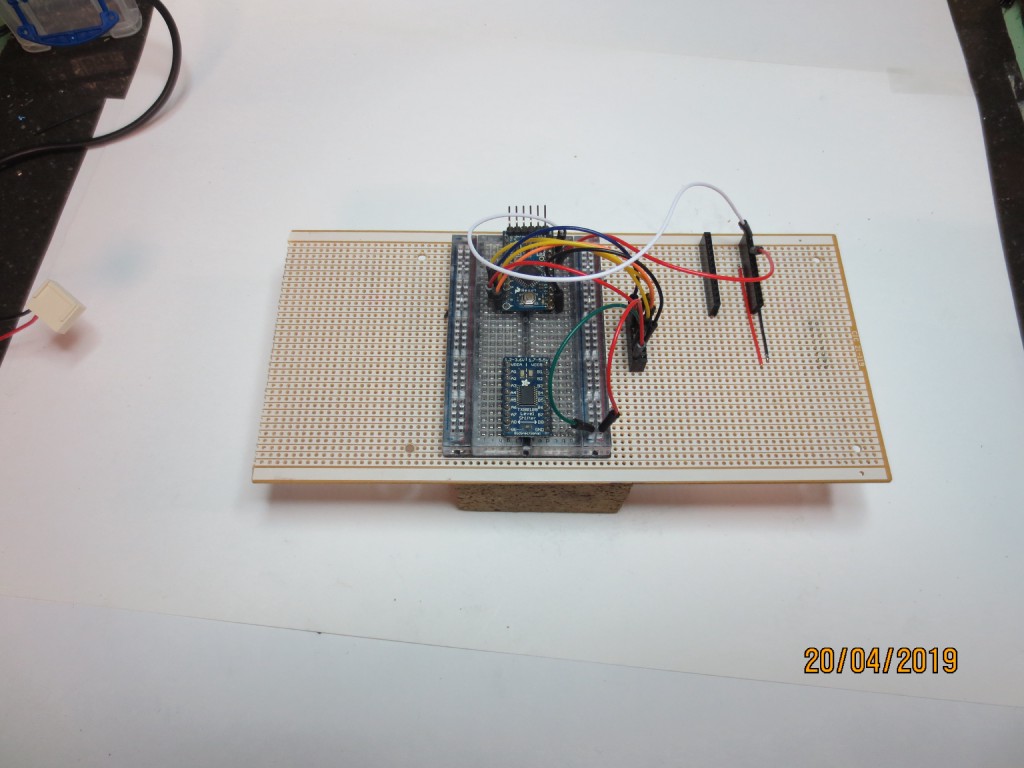
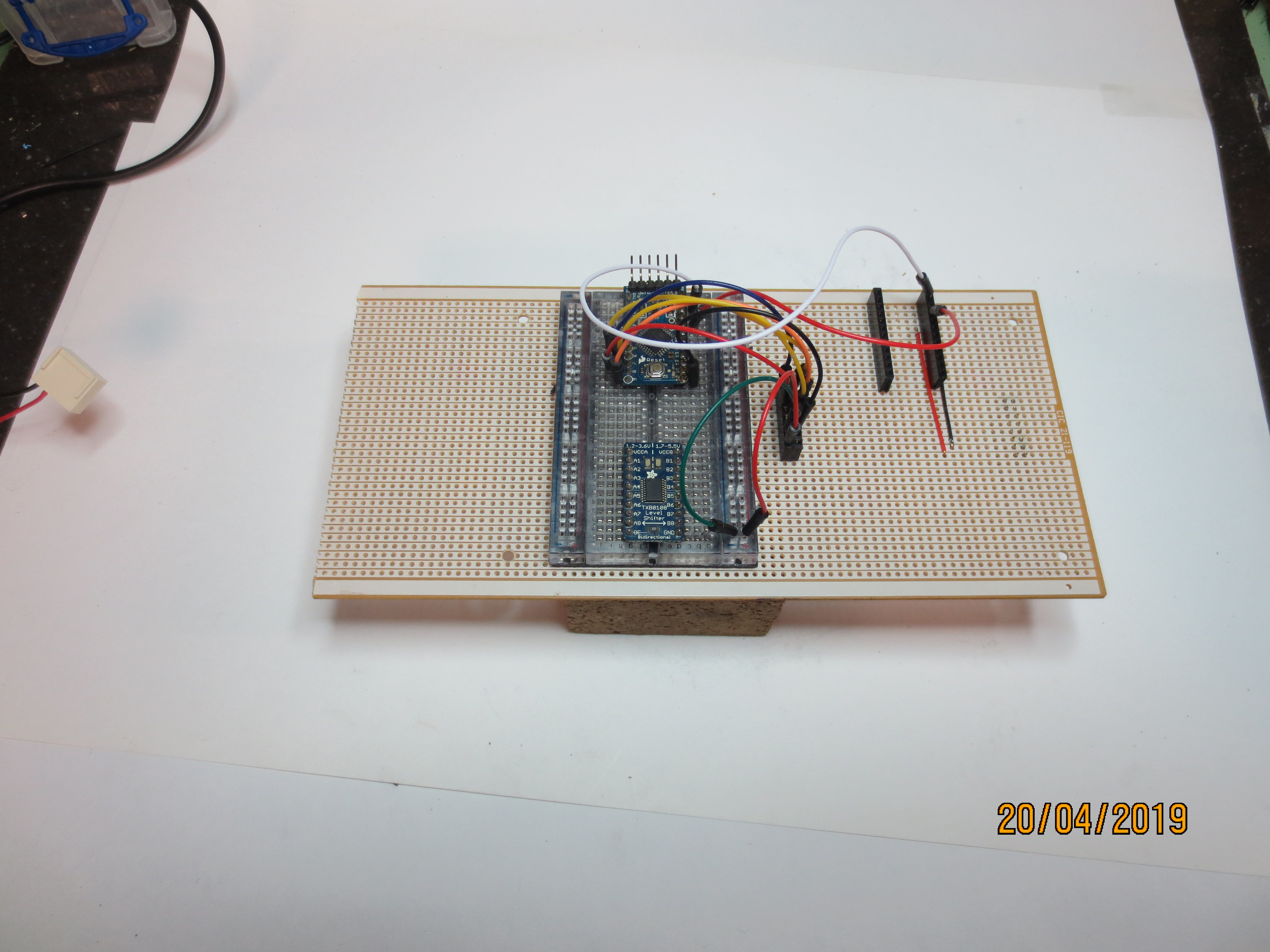
Finall the top level , this is where all the control electronics will live. I am currently in the process of transferring the Arduino off the bread board onto the pin headers on the left
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Building continues …